可用于灾害救援 “电子蟑螂”软体微型机器人面世
| 2025/8/2 9:22:49 《最新论文》 作者:365体育投注:科学报 杨晨 我有话说(0人评论) | 字体大小:-│+ |
近日,电子科技大学机械与电气工程学院吴一川/彭倍团队在《自然—通讯》发表研究论文,报道了一款新型具备高机动性与强稳健性的“电子蟑螂”软体微型机器人。
研究人员研制出一款重约1克、长约2厘米的软体微型机器人。该机器人采用巧妙设计的柔性机构,通过调节单个驱动器的频率,便可灵活控制腿部末端运动轨迹的形状、方向与倾斜角度,展现出高度的可控性与系统集成度,实现了以往通常需多个驱动器才能完成的轨迹可控运动。
实验结果显示,该机器人在同类型的无线微型机器人中展现出领先的运动性能,正面和反面姿态均具备灵活的运动控制能力。同时,还实现了闭环路径跟踪、水陆两栖运动。
值得一提的是,该机器人结构设计具有良好的韧性和抗冲击性能,即使受到成人踩踏等强烈外部冲击后,依然能够保持良好的运行状态,体现出如“小强”般的顽强生命力,为其在复杂和极端环境中的实际应用奠定了基础。该项成果展示了电子科技大学在昆虫仿生微型机器人领域的积极探索,也为机器人在灾害救援、管道巡检、狭小空间作业等应用场景提供了新的技术思路和理论支持。(来源:365体育投注:科学报 杨晨)
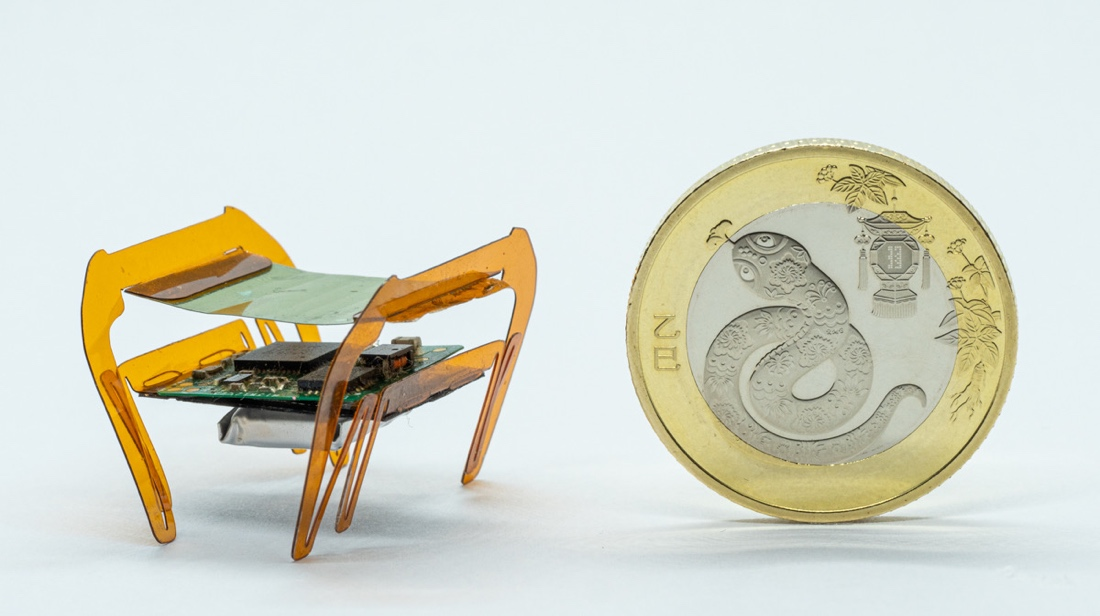
“电子蟑螂”软体微型机器人。电子科技大学供图
相关论文信息:https://doi.org/10.1038/s41467-025-61810-1
版权声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。